摘 要:对三环减速器传动机理进行了研究,根据动力分析计算结果提出了减小三环减速器振动的措施,并进行了试验研究。试验结果表明,适当提高内啮合齿轮副的啮合角和传动系统轴系刚度能有效减小三环减速器的振动,而对内齿板死点位置的内齿齿形进行修形减振效果不佳。
叙词:减速器;机理;振动控制;试验研究
引言
三环减速器是我国首创的一种新型齿轮传动装置,与现有各种主要齿轮传动形式相比,具有结构简单、体积小、重量轻、传动比大、传动效率高、承载能力强、制造成本低等优点。在矿山、冶金、石油、化工、起重运输和造船等许多领域具有十分广阔的应用前景,近年来发展很快,已列入冶金工业部部颁标准[1]。这种新型传动装置若能在各大工业部门广泛应用,必然会带来巨大的经济效益。
由于三环减速器问世时间不长,目前的设计及系列化工作只能靠简单的类比进行,缺乏可靠的理论依据,在使用过程中普遍存在严重的振动、冲击和噪声,在重载、高速、大传动比情况下问题更为突出,大大影响了推广进程,因此开展对其振动控制措施的试验研究具有十分重要的意义。
1 三环减速器的基本结构及传动原理
三环减速器属于KH型少齿差行星齿轮传动中外置偏心轴形式中的一种,其基本结构形式如图1所示:2根互相平行且各具有3个偏心轴颈的高速轴3,动力通过其中任一轴或两轴同时传入,3个传动内齿轮1通过轴承2装在高速轴上,外齿轮7的轴4为低速轴,其轴线与高速轴3的轴线平行,低速轴通过轴承5支承在机体6上,3个内齿轮1与外齿轮7啮合,啮合瞬时相位差呈120°。高速轴与低速轴的回转方向相反,其传动比的计算公式如下:
图1 三环减速器基本结构
1.内齿行星轮;2.转臂轴承;3.转臂偏心轴;4.输出轴;5.支承轴承;6.机架;7.外齿轮
式中z1——外齿轮齿数
z2——内齿轮齿数
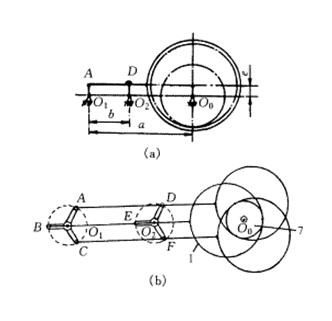
负号表示与回转方向相反。3个内齿轮类似于3个行星轮,因而外齿轮直接输出,故没有一般行星齿轮的行星架或少齿差传动的输出机构,简化了机构,同时保留了同轴传动减速器的传动比大和结构紧凑的特点。其传动原理如图2所示,当输入轴旋转时,行星轮(内齿轮1)不是作摆线运动,而是通过一双曲柄机构(具有偏心轴颈的高速轴)引导作圆周平动,这种平行轴传动解决了原少齿差传动减速器同轴传动方式(即输入轴与输出轴在同一轴线上)带来的行星轴承受力大、寿命短等难题,降低了行星轮轴承的动载荷,不需专门的输出机构,因而结构简单、重量轻(比普通圆柱齿轮减速器重量相应减小2/3)、传动比大(单级为1~99,双级高达9801)、传动效率高(92%~96%)、制造成本低[2]。
图2 三环减速器传动原理
(a)一相双曲柄机构;(b) 三相并列双曲柄机构
2 结构改进
三环减速器具有三相并列双曲柄机构[3],其自由度F=-1,机构所含虚约束数为w=2。由于虚约束的存在,运动链不满足静定条件,机构受力无法用刚体力学方法完全确定。通过引进机构位移协调条件,将机构转化为受力变形等效的结构体,再应用结构力学的分析方法,建立起三环减速器的动态分析模型。对该模型进行受力分析时发现内啮合齿轮副的啮合角、传动系统的轴系刚度对其动态性能有较大的影响,通过改变啮合角,调整传动轴系刚度可以达到改善系统动态性能的目的[4]。
分析对象为SHQ40型偏置式三环减速器,其基本参数:高速输入轴与输出轴之间的距离a=400mm,传动比i=20,齿轮齿数z1=60,z2=63,模数m=4mm,压力角α=20°,齿轮啮合角α′=28.11°,两高速轴间的距离b=190mm,内齿板的质量m2=17.3kg。此时实际中心距为:
根据SHQ40型三环减速器的优化结果[4],在不增加加工装置和加工装配难度的前提下,对结构参数作如下改进:
(1) 内啮合齿轮副的啮合角α′由28.11°改为33.989°,此时实际中心距e由6.392mm变为6.8mm。
(2) 输入轴、中间轴的直径和偏心套内孔由φ45mm改为φ50mm。
(3) 在输出轴两箱体轴承的外圈加φ160×3mm的弹性均载套,材料为聚四氟乙烯。
按上述改进方案,设计制造出一台改进型SHQ40型三环减速器。
3 试验研究
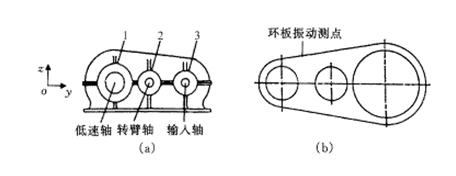
为了检验改进措施的效果,在电封闭式齿轮传动试验台上对改进前后两台减速器在输入转速n输入=1000r/min,输入力矩T输入=97N.m的工况下进行了振动对比测试试验,测点布置如图3所示。试验采用了B&K振动测试放大系统、MR30磁带记录仪及CF555频谱分析仪。图4~6分别是改进前后各测点振动加速度时域和频域图。
图3 各测点布置
(a)箱体轴承座振动测点布置;(b)内齿板振动测点布置
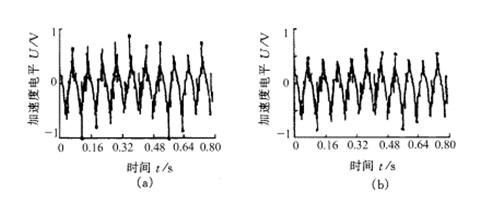
图4 内齿板水平方向振动加速度时域图
(a)原减速器;(b)改进减速器
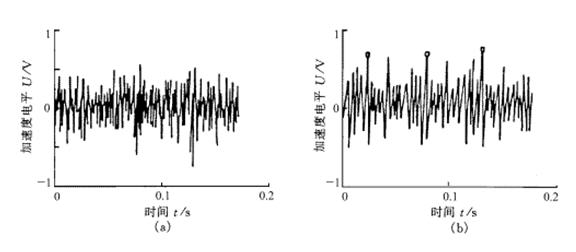
图5 输入轴轴承座水平方向振动加速度时域图
(a)原减速器;(b)改进减速器
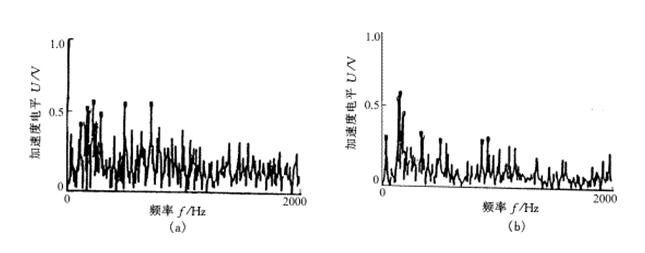
图6 输入轴轴承座水平方向振动加速度频域图
(a)原减速器;(b)改进减速器
图4中,稳态正弦信号代表内齿板刚体平动,其振动频率恰好为输入轴转频f=16.667Hz,每转一周两次冲击分量叠加其上。分析表明高速轴转动一周,环板受非等幅冲击两次,内齿板过死点位置时高速轴将受到水平方向和垂直方向的双向冲击力的作用,冲击发生在机构过死点位置附近。由于每块内齿板都存在同样转频周期性激励冲击,相位彼此相差120°,叠加后的总效果仍然是转频周期激励。图5、6分别是输入轴轴承座水平方向振动加速度的时域波形图和频域波形图,箱体振动时域信号表现出明显的周期性冲击宽带激励和结构共振调制的特性,从箱体振动冲击频域图中可以看出输入轴转频信号及啮合频率均较小,表明不平衡惯性力、啮合刚度波动及啮合冲击对整机振动贡献较小。内齿板过死点产生的周期冲击激励是振动的主要原因,采用平衡措施抑制振动的可能性不大。
表1 各轴承座振动速度的有效值 mm/s
目前上常用振动速度的有效值来评价齿轮传动装置的振动。为了检验改进措施的效果,表1列出了改进前后各测点振动速度的有效值。从表1中可以看出两高速轴箱体轴承座振动较大,而低速轴箱体轴承座振动较小,输入轴箱体轴承座水平方向振动Z大,改进后其振动速度有效值下降为原来的41.1%,表明改进措施有显著的效果。
4 内齿轮齿形修整对振动的影响
根据上述测试结果分析,内齿板过死点位置产生的周期冲击激励是振动产生的主要原因,要降低三环减速器的振动,就必须降低其机构过死点位置时的冲击。三环减速器三相并列双曲柄机构在图7所示位置时双曲柄机构O1CO2F处于死点位置,运动处于不确定状态。由于啮合力的作用将产生瞬时冲击力。为了消除或减小该死点位置的冲击作用,在一定角度θ内对O1CO2F上的内齿轮齿形进行修形,使其在死点位置时平面双曲柄机构O1CO2F不受啮合力或少受啮合力的作用。这样可以通过其余两相双曲柄机构带动它越过死点位置,从而达到减小死点冲击的目的。同样对其他两相机构做相应的修形。根据内齿板的具体齿形,选择在死点位置(θ=0°和θ=180°)时,内齿板上相邻3个内齿齿形进行修形,具体做法是将这3个内齿齿形沿齿高方向锉去0.4mm,并将此内齿沿齿宽方向的两侧倒R0.5mm的过渡圆角。为了检验修形对三环减速器振动冲击的影响,对修形后的三环减速器在相同的工况下进行振动测试。测点布置和测试方法同上,各轴承座振动速度的有效值见表1。从表1中可以看出,由于修形后导致传动不连续,产生啮入和啮出冲击,致使其振动速度有效值的Z大值(输入轴轴承座水平方向)增大了19.07%。
图7 内齿板修形位置
5 结论
(1) 齿轮副啮合角、轴系刚度对三环减速器振动有较大的影响,适当提高内啮合齿轮副的啮合角和传动系统轴系刚度能有效减小三环减速器的振动。
(2) 对内齿板死点位置内齿的齿形进行修形(死点位置的3个内齿齿形沿齿高方向锉去0.4mm,并将此内齿沿齿宽方向的两侧倒R0.5mm的过渡圆角)对三环减速器减振降噪的效果不佳。
作者单位:朱才朝 重庆大学机械传动国家重点实验室 博士, 400044 重庆市
秦大同 重庆大学机械传动国家重点实验室主任 教授 博士导师
韩 西 重庆大学机械传动国家重点实验室 博士 副教授
刘清友 西南石油学院机械系 博士后 副教授, 637001 南充市
参考文献
1 蔡春源. 机电液设计手册. 北京: 机械工业出版社, 1997. 985~988
2 应海燕, 杨锡和. KH型三环减速器的研究. 机械传动, 1992, 16(4): 37~43
3 Zhu Caichao, Qin Datong, Li Runfang et al. Vibration control and experiment of the three-ring reducer. 机械工程学报(英文版), 1998, 11(4): 319~325
4 朱才朝. 三环减速器振动控制的研究: [博士学位论文]. 重庆: 重庆大学, 1998.












 企业新闻
企业新闻 轴承知识
轴承知识